Kangarouter
A robot based on a hover-board, to shoo mobs of kangaroos off the paddock.
WIP warning

Why?

Mobs of kangaroos hang around the farm, and compete with the stock for the available feed. This is a serious problem. Livestock in this country are currently dying due to lack of feed in the drought, and the mobs of kangaroos are making the situation worse.
Working plan
The robot has a camera which monitors the paddock.
The pictures from the camera are analysed via a neural-net object classifier, which recognises kangaroos.
If any kangaroos are visible, the rover approaches the them with its lights flashing, and makes a growling sound through the speakers (a recording of a growling male kangaroo).
The kangaroos will not be distracted by the sight and sound, and (being prey animals) will not eat in the presence of the distraction, and will eventually leave.
When kangaroos are no longer visible, the rover returns to the observation position, and back into monitoring mode.
Kangarecognition

A neural-net running on a modern computer should detect kangaroos reliably enough to control a robot. Even a 90% reliability would be enough for the kangarecogniser to be highly effective. If the rover occasionally responded to phantoms, then so be it (provided it didn't consistently respond to the same one, such as the same bush on the property which looked something like a kangaroo, or a QANTAS logo on a nearby billboard).



These photos, taken with a mobile phone camera, feature many kangaroos. The first photo contains three in the foreground, and many more behind.
They are easily recognisable to a human as kangaroos, but actually the images are quite poor.
 The foreground kangaroo actually looks like this.
The foreground kangaroo actually looks like this.
 And the clearest one in the background looks like this.
A human could pick this, but a neural-net might struggle.
And the clearest one in the background looks like this.
A human could pick this, but a neural-net might struggle.
The (Galaxy S8) phone camera is 4032x2268 pixels.
A 'hi-res' 8M Raspberry Pi camera is only 3280x2464.
The 5M Chinese cheapies are only 2592*1944.
An alternative might be to put a zoom lens on the rover's camera and do some scanning, but that would involve more moving parts.
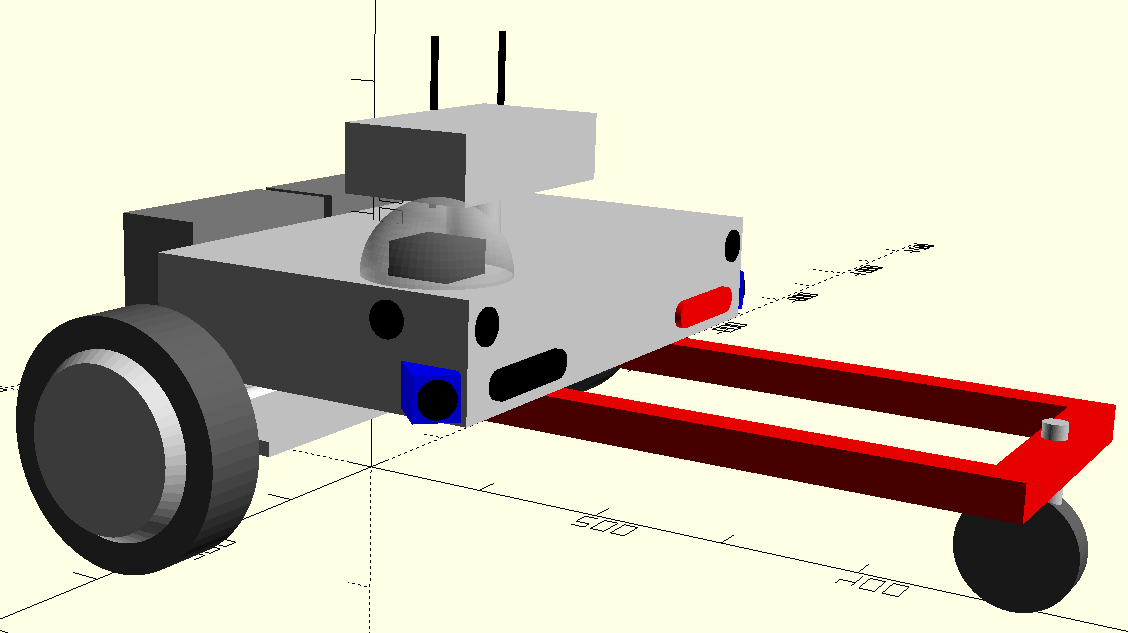
The CAD concept
Hardware

Hoverboards make good robot drivers and second hand appear Gumtree for around half of the new price. These have quality in-wheel motors, and a sturdy frame capable of carrying a 80kg weight around on a flat surface, and move quickly - much more quickly than Grandma's wheel-chair is designed to.
The hover-board base can be bolted to a frame, and a front caster wheel put into it. This is the easiest way to mount the wheels if metallic fabrication is not an option.It must be fixed so that the sides don't swivel in relation to each other (that's the mechanism that a hover-board uses to work out whether you want to turn).
The caster wheel should be in front, not the back (it's fashionable to put a caster wheel or caster skid at the back, but that will cause tip issues if the rover needs to brake suddenly).
The (in-wheel) motors are three phase brushless DC motors, which require appropriate controllers.
Suitable controllers are available on eBay for around $AU15 each.
It should be possible to use the original battery from the hover-board, though some have suggested that a higher quality controller might be required for 36V.
Execution
Note the ZS-X11B BLDC motor controller. I ordered a ZS-X11A on eBay, so of course they sent me a ZS-X11B. Thanks guys.
Apparently this is pretty standard from the suppliers of these things. So I ordered another one the same, and got lucky - they made exactly the same mistake again so I got two the same (I could hardly have demanded a refund of an item on the grounds that they sent me the right one this time!) The ZS-X11B relies on Hall sensors, but that's okay - the motors have them.
In fact this worked out well - Hall sensors are actually critical for manoeuvring at low speeds.
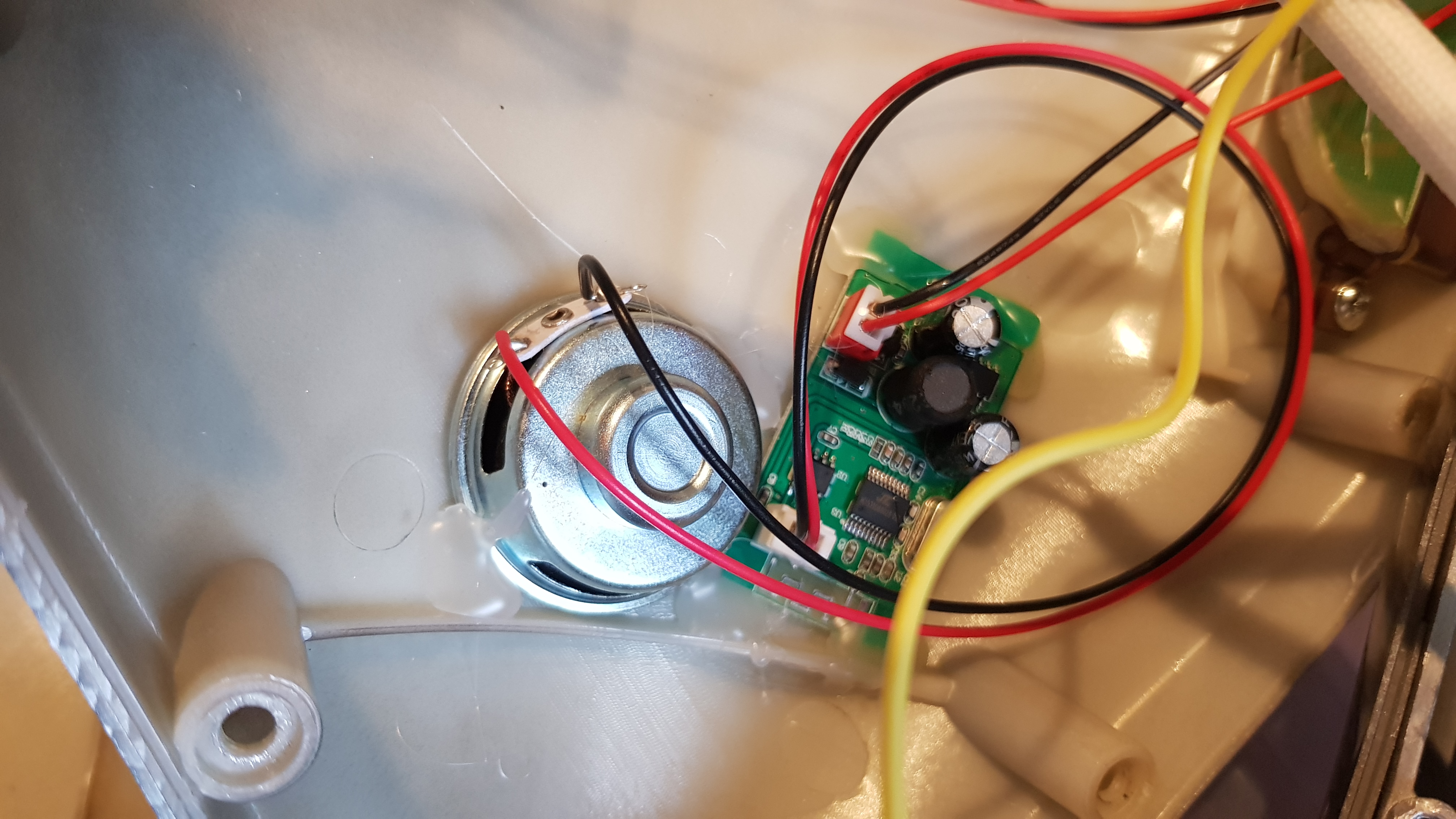
Here are two detailed photos for anyone who wants to look at the circuitry.


And here is a close-up of (I presume) the built-in bluetooth speaker. That might be useful for the kangarouter to make growling noises.
Issues - joining the mob

The rover should not try to come into contact the kangaroos, but merely to approach them. It should stop at some (configurable) distance away from them. There is no real issue with going into the middle of a mob, we are not trying to herd them in a particular direction (though that might be stage-II), but just to make them feel uneasy enough to eat elsewhere.
Kangaroos behave like prey animals. They won't put their heads down and eat with a potential threat nearby, because the have to take their eyes off the threat source. They will eventually just go elsewhere.
Issues - coveting thy neighbour's paddock
The rover should know the boundary of the paddock (and the location of fences which it can't cross). It should make an estimation of the location of any kangaroos it sees (based on the rover location, the size of the kangaroo, and it's direction). If the kangaroo is judged to be outside the paddock it should be ignored.
Build - hardware
 So we take these bits away.
So we take these bits away.
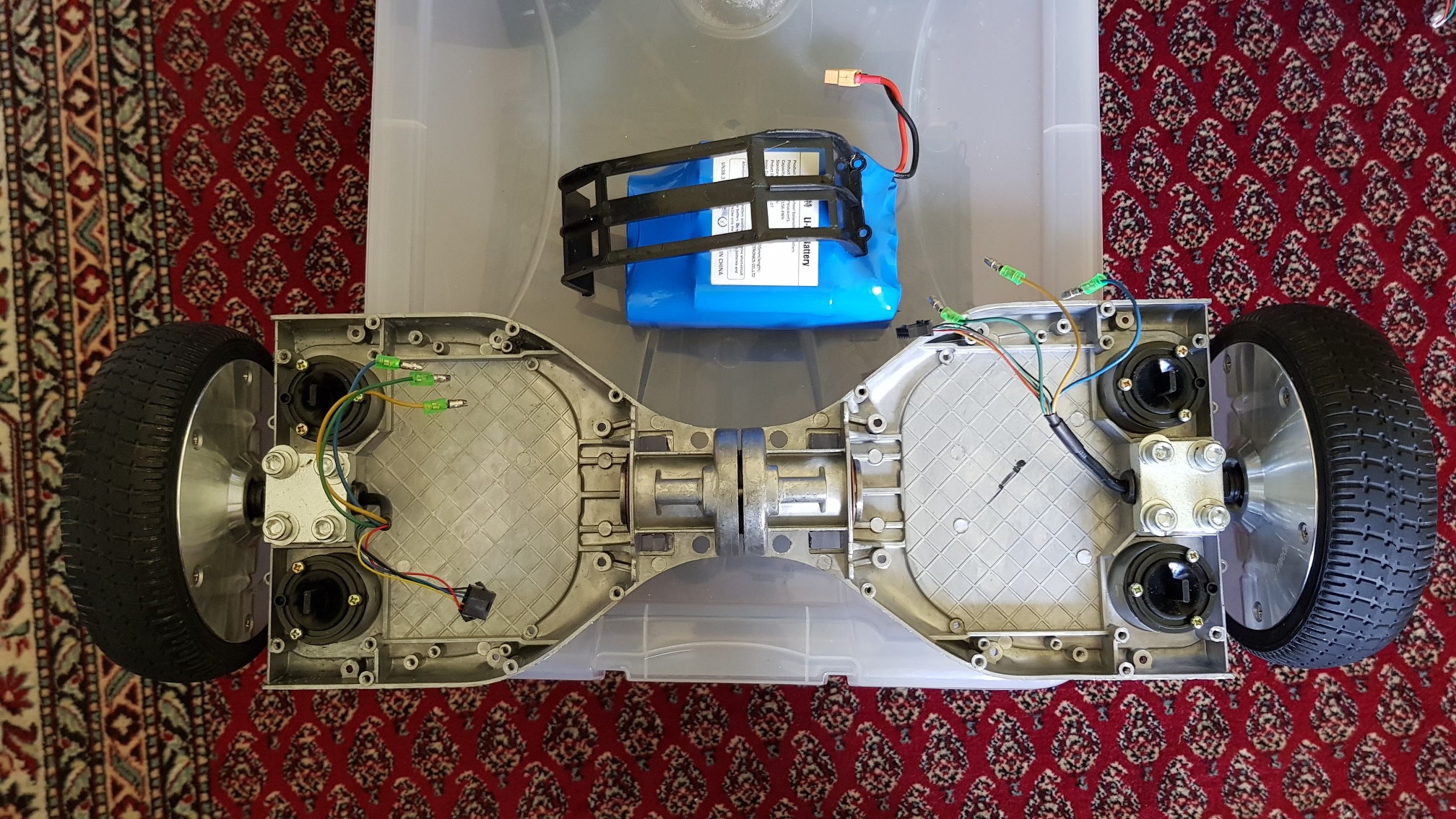 And we are left with the useful bits - basically the battery, the in-wheel motors, and the base.
And we are left with the useful bits - basically the battery, the in-wheel motors, and the base.


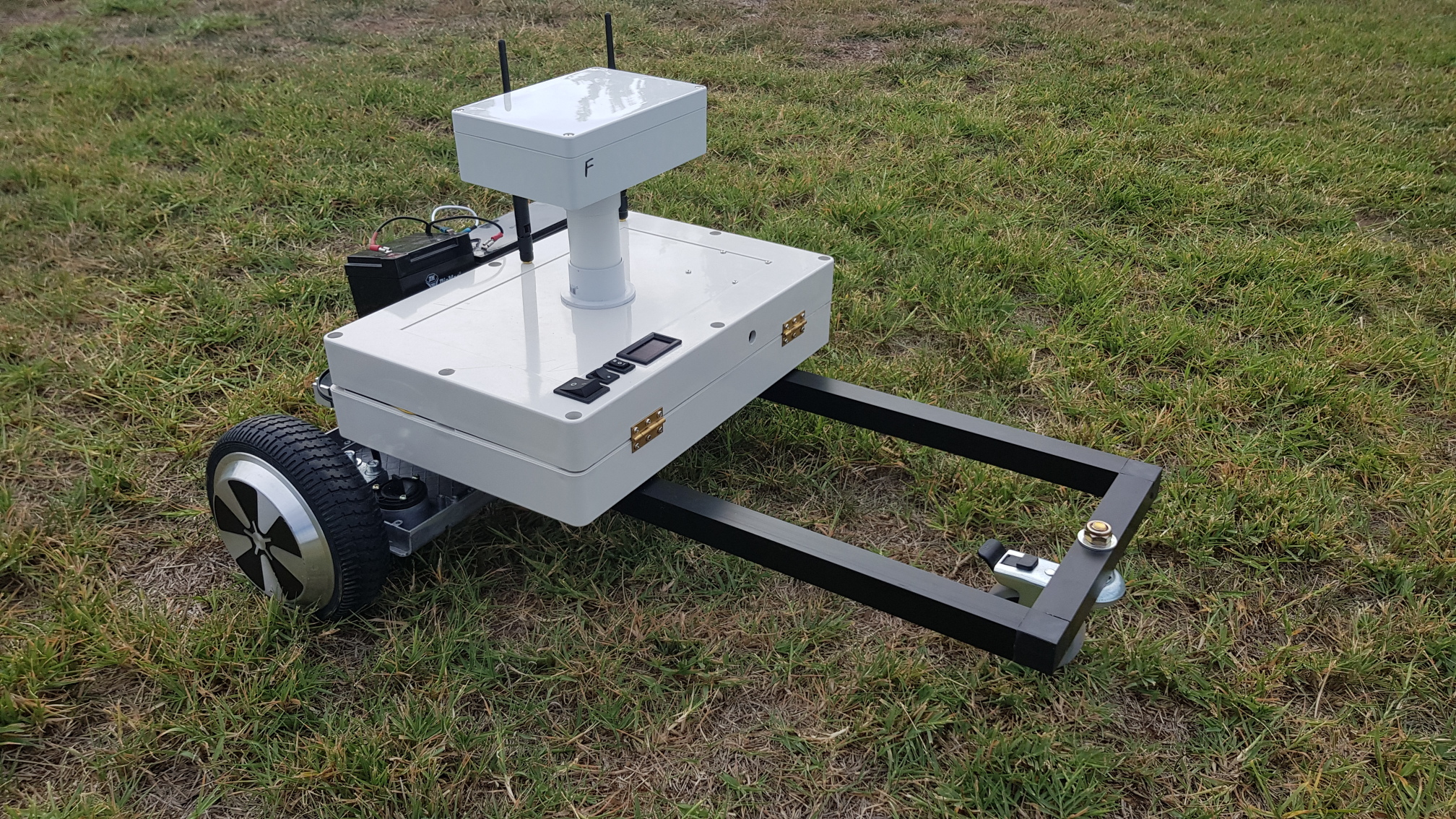
So we fit these to a frame (some anodised 25mm aluminium tubing), and put a caster wheel on the front, and voila.
(Actually I later replaced the caster for a smaller one and shortened the base.)
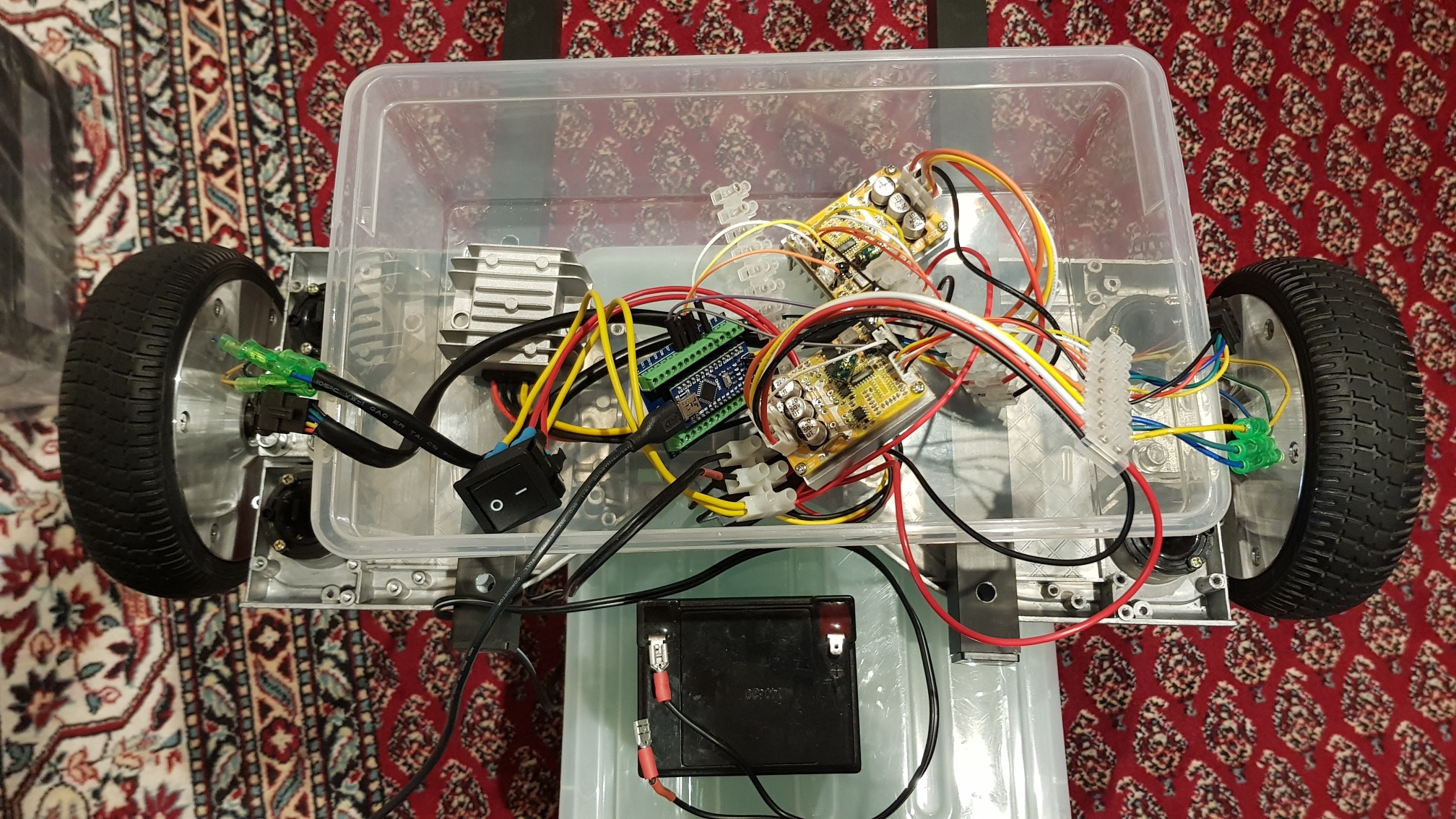 The Arduino, controlling both ZS-X11B controllers are here in a temporary box.
The voltage converters are for (later) 36V control to come down to 12 and 5V to power the Arduino, the Raspberry Pi and other components (not yet installed).
This rig was basically for testing the motors controllers with the Arduino (but see later notes below).
The Arduino, controlling both ZS-X11B controllers are here in a temporary box.
The voltage converters are for (later) 36V control to come down to 12 and 5V to power the Arduino, the Raspberry Pi and other components (not yet installed).
This rig was basically for testing the motors controllers with the Arduino (but see later notes below).
Assembly
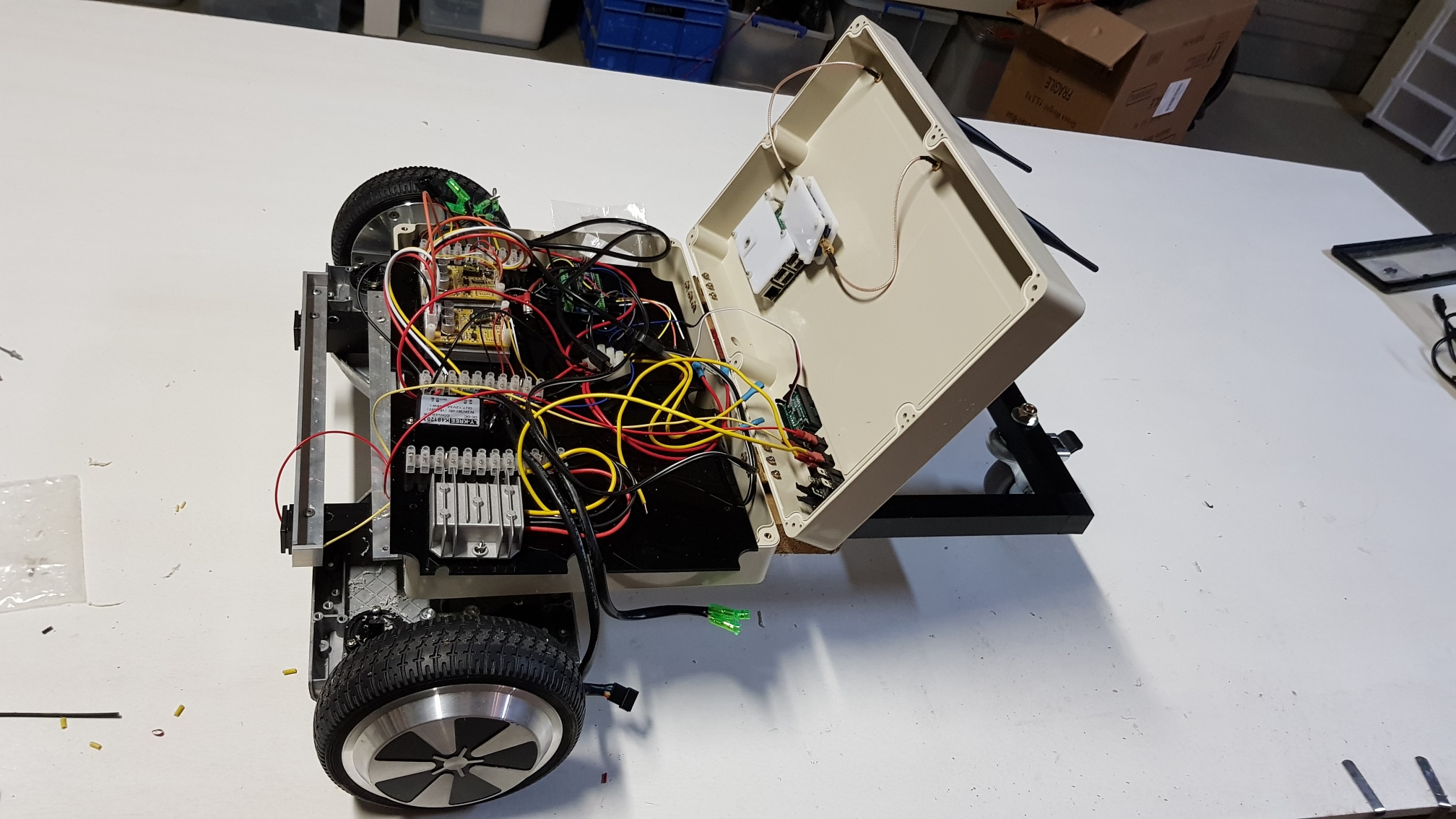 Everything seems to work, so put it in a proper box.
Everything seems to work, so put it in a proper box.I made space for normal SLA batteries because I didn't actually have any way to charge the 36V lithium ion battery which came with the hoverboard.
Actually the original hoverboard controller has a charger in it, so I could have used that.
Oops!

There is a weird mix of batteries here. It's just for testing.
There is no collision avoidance or detection on the rover.

Also the camera is not yet fitted (though there is a peep-hole in the front), and there are no flashing lights or speaker for growling.
Cool links
 Hoverboard conversion
Hoverboard conversionSkidrover
Get Allegrobotics updates on twitter
How NOT to do kangaroo recognition - a fun clip to watch, but watch to the end and apparently any moving thing here is recognised as a kangaroo.
How I hacked the self-balancing scooter - Drew's Blog.
Leave a comment
 Something I'm doing wrong? Solved my problems? Got a better idea? Got a similar problem?
Something I'm doing wrong? Solved my problems? Got a better idea? Got a similar problem?Think I might have solved your problem? Ninety-nine problems, but your robot ain't one? Say so ..