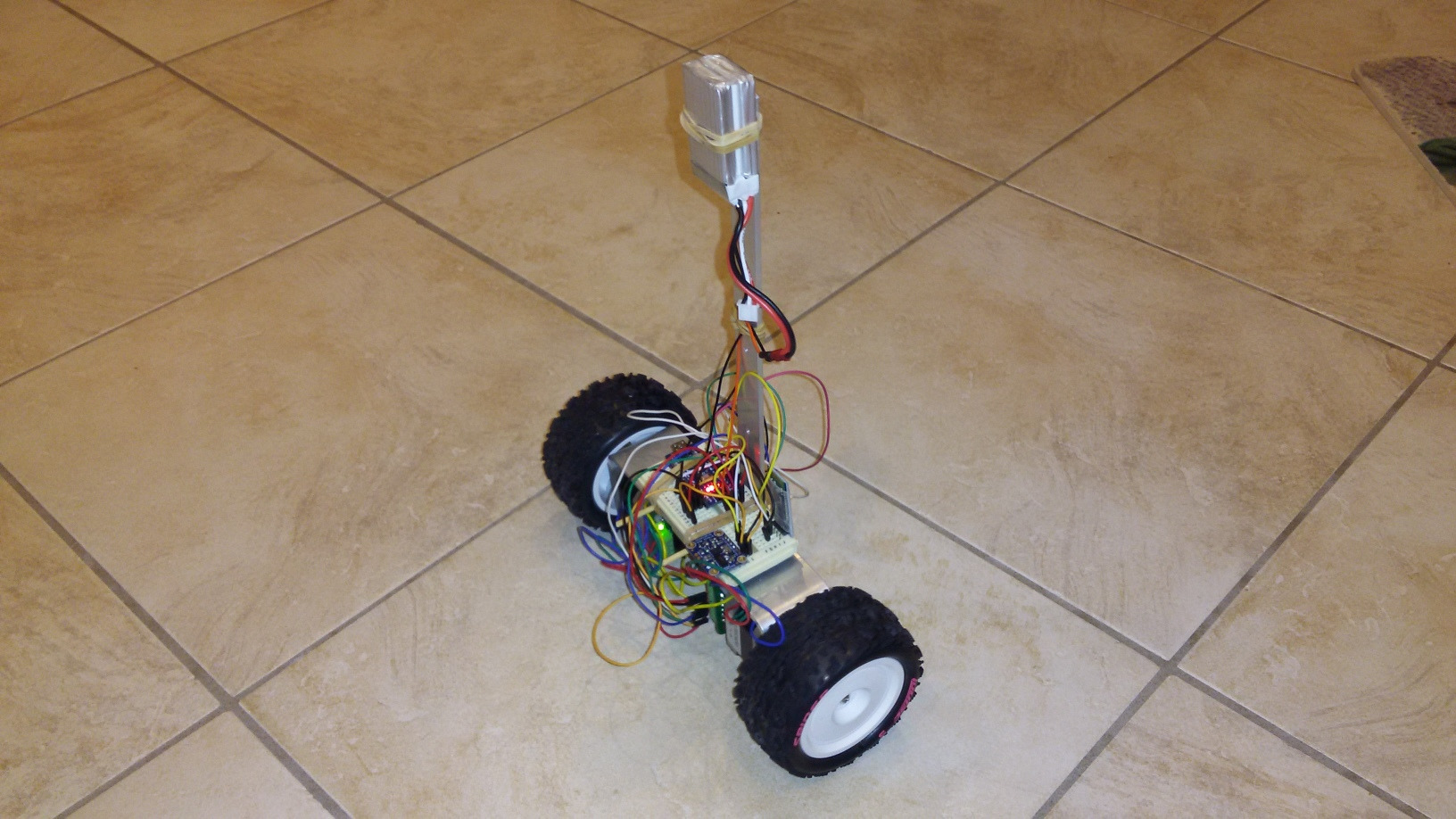
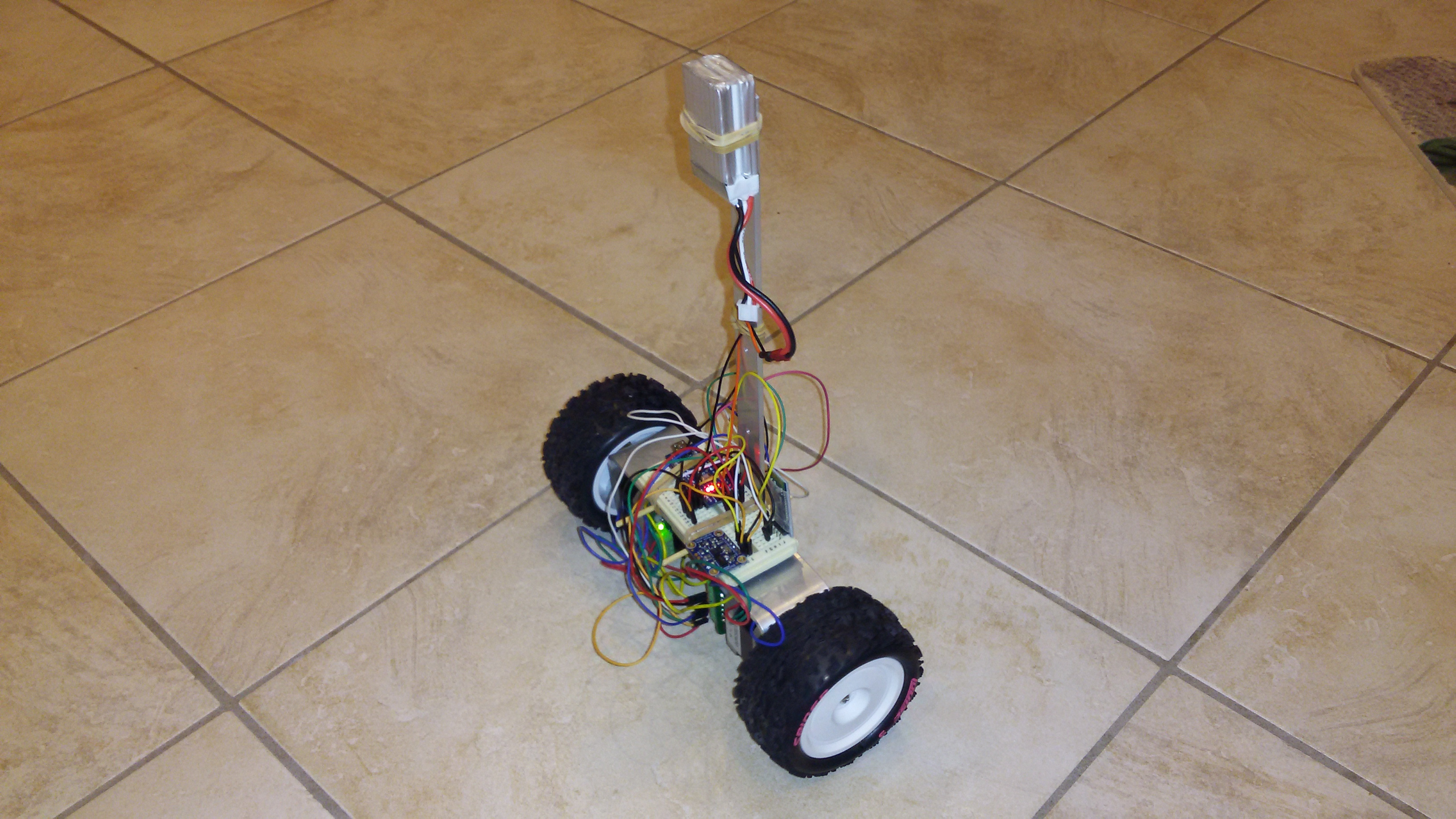
George Orwheel (Stepper Motors)
Two wheel differential drive balancing robot. Because four wheels are baaaad.
Why?

Because it is the 'hello world!' of modern robotics.
Components
 |
Arduino Nano | EBay | Lightweight, 5V tolerant, easy to program, cheap as silicon chips, and no tears when clumsy roboticists fry them |
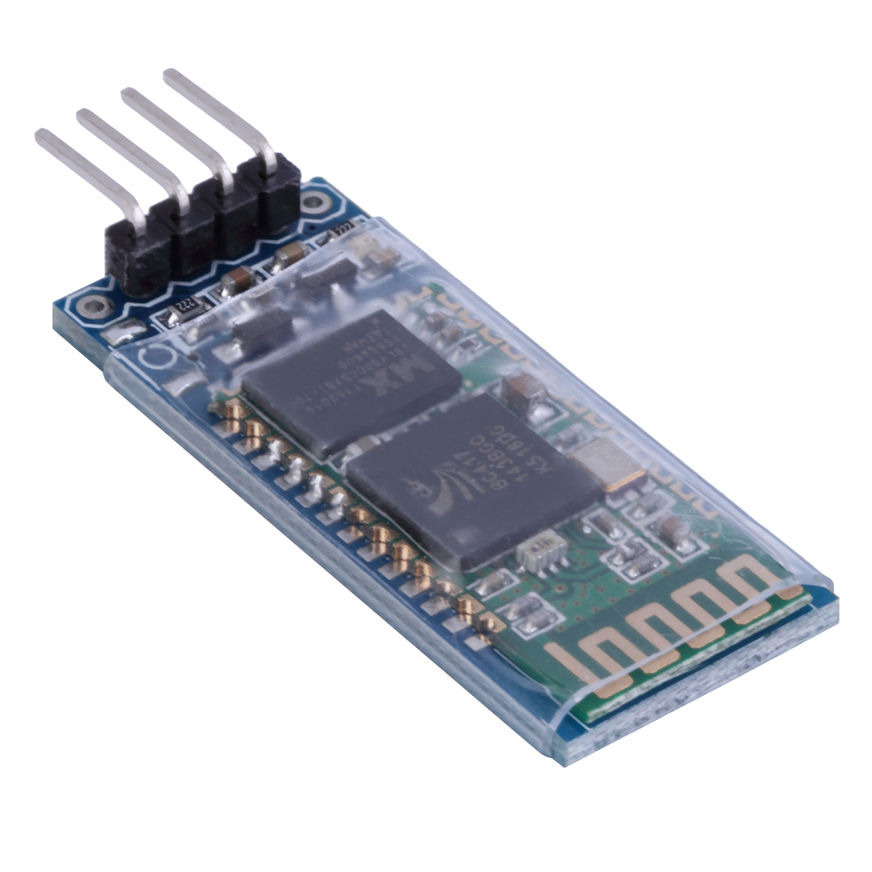 |
Bluetooth receiver | EBay | If you want to control it remotely from the PC or a phone |
 |
BNO055 | EBay | IMU which does the orientation calculation on-chip. |
 |
Stepper Motors | EBay | An odd choice for this kind of robot |
 |
Stepper Motor Controllers | AliExpress | The ZD-M42s work well with an Arduino, but will not work well with a 3V3 source like a Raspberry Pi. |
 |
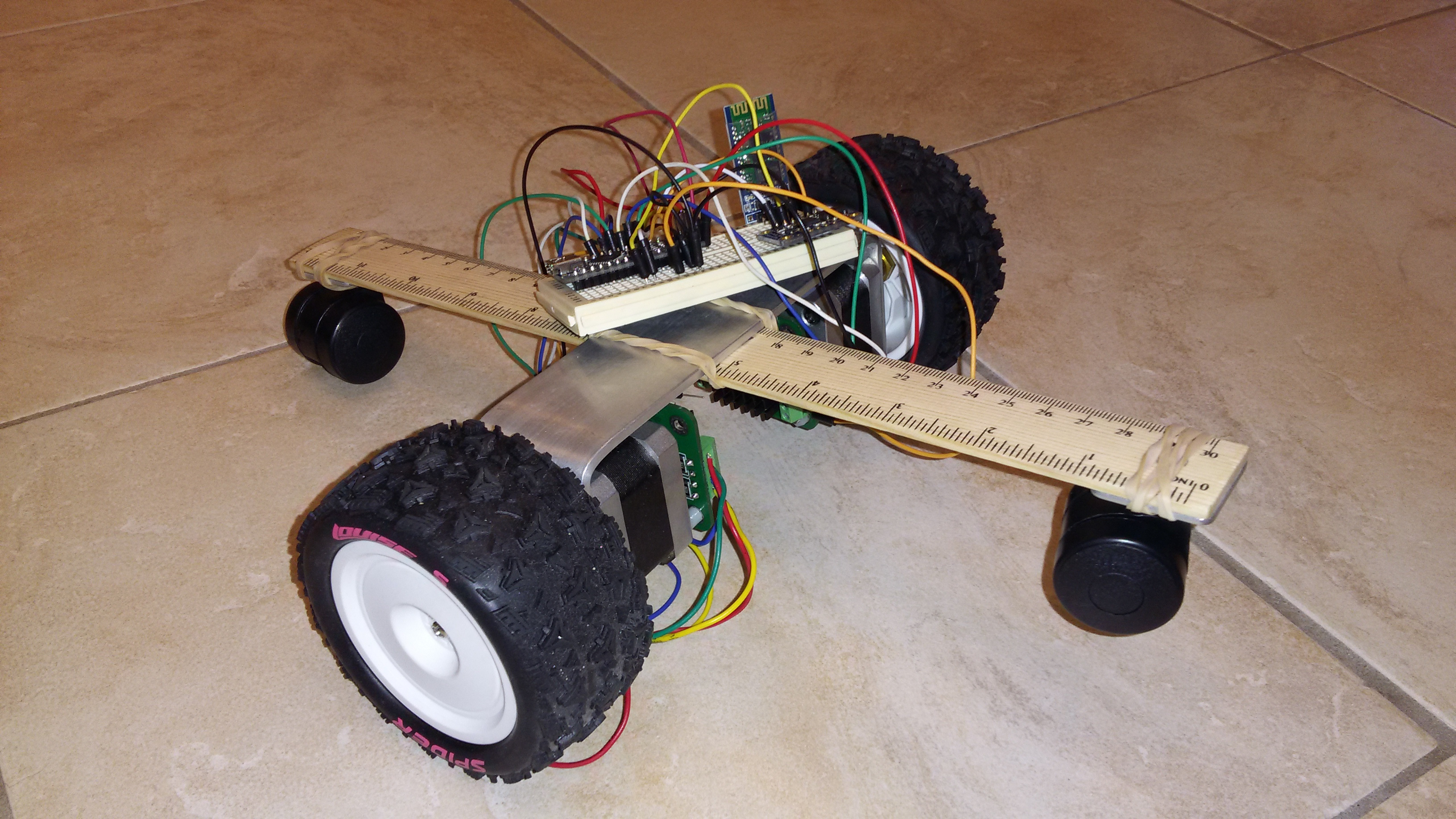
Robot Wheels | EBay | These wheels are designed for a RC model car. There are many types of fittings. They have to fit onto the shaft of the steppers - an adaptor might be needed. |
 |
Aluminium Bar | Bunnings | Easy to bend, drill and fashion - for the frame. |
 |
Mini Caster. | Bunnings | These are just for the training wheels. Actually you don't even need the wheels on the ends of the ruler - just a ruler to stop the robot falling over. Maybe some soft buffers or something. |
 |
7.4 Li-ion battery | EBay or local hobby shop | Should try out an 11.1V one of these. |
Why Steppers
Because they can be controlled easily, and don't have unpredictable torque issues.
Because it's winter, and indoor robots can be built next to the fireplace.
Circuit diagram
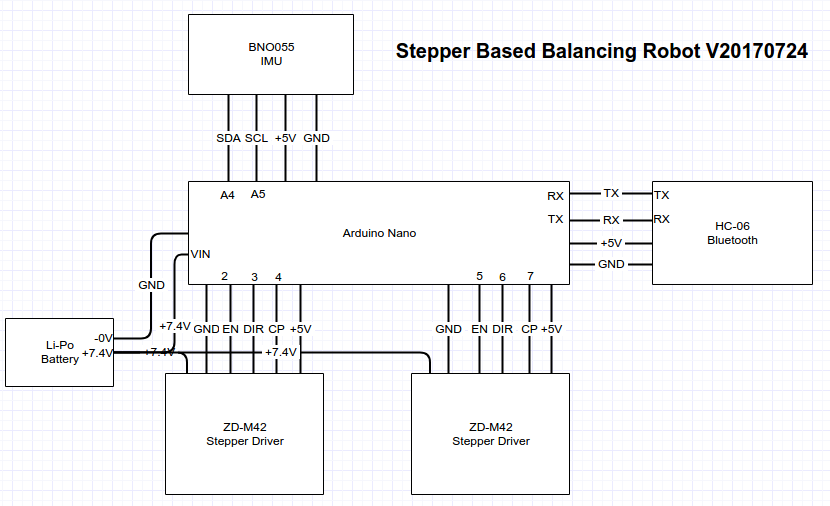
Notes:
The TX from the HC-06 is 3.3V, but it's high enough to trigger Arduino RX without a level converter. It ain't MILSPEC but it works.7.4V (from two Li-Pos) is a good voltage to run the Nano from. A 6V SLA was tried, and it sagged when the motors started, crashing the Arduino. SLAs are fine for wheelchair robots, but lithium has so many advantages.
Software libraries

-
BNO055 Arduino library from Adafruit
Software

There really isn't much software to make this go. This is a pretty simple program.
Unfortunately, it's kind of tricky to do the timing on an Arduino to do this well - reliably pulsing a stepper motor controller faster than 1ms is a bit messy on the Arduino when you want to do other things along the way (like interrogate the IMU via I2C). DC motors would seem to be a better match for this, but the torque seems to be unpredictable.
The future

-
DC Motor Version.
Write a interrupt/timing Arduino program to control the steppers, and get around the 1ms issues.

Leave a comment
 Something I'm doing wrong? Solved my problems? Got a better idea? Got a similar problem?
Something I'm doing wrong? Solved my problems? Got a better idea? Got a similar problem?Think I might have solved your problem? Ninety-nine problems, but your robot ain't one? Say so ..