Robot Hand (well .. a finger anyway)
A robot finger made with a CNC mill and some using a mini linear actuator, a 3mm acrylic sheet and some M4 bolt.

Why?

Why not? Generally, anthropomorphic robots belong on the scrap heap of Japanese age-pyramid insecurity subsidies and adolescent sci-fi fantasies, but the temptation of an unused CNC mill, some spare mini actuators and inspiration from a similar but much more expensive interweb-based robot hand was too much to resist.
Components
 |
Acrylic Sheet | Bunnings | Don't get black acrylic sheet - it's too hard to see what is going on. I just had black lying around from another project. Use a light colour or clear. Red is a good colour for robots. |
 |
20mm M4 Bolts | Bunnings | With the nylon lock nuts. Actually using proper stainless hex-head bolts is much nicer for robots, but I used what I had. |
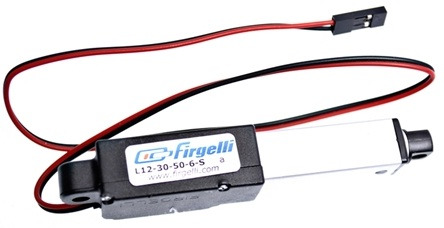 |
Mini Linear Actuator | firgelliauto | Actually these are quite expensive (around $US70 each). The Chinese don't seem to be making copies either, so they are only available from 'expensive' sources. I had two of these lying around from another project. The actuators used were L12-50-50-6-S, not the L12-30-50-6-S, though the L12-30-50-6-S would probably have been a better choice. |
Actuators - Odds and Sods

This project was made from bits lying around from other projects. In particular, I liberated the linear actuators which were left over from an abandoned prototype at work. They are longer than needed for this project - they have a 50mm throw, but only 20mm is required, and a gear ratio of 100:1 would make it half as fast and twice as strong.
Some of the dimensions of the actuators were hard to work with. In particular the gap between the fastening holes and the body or slider is very small, clearly making this the weakest part of the finger.
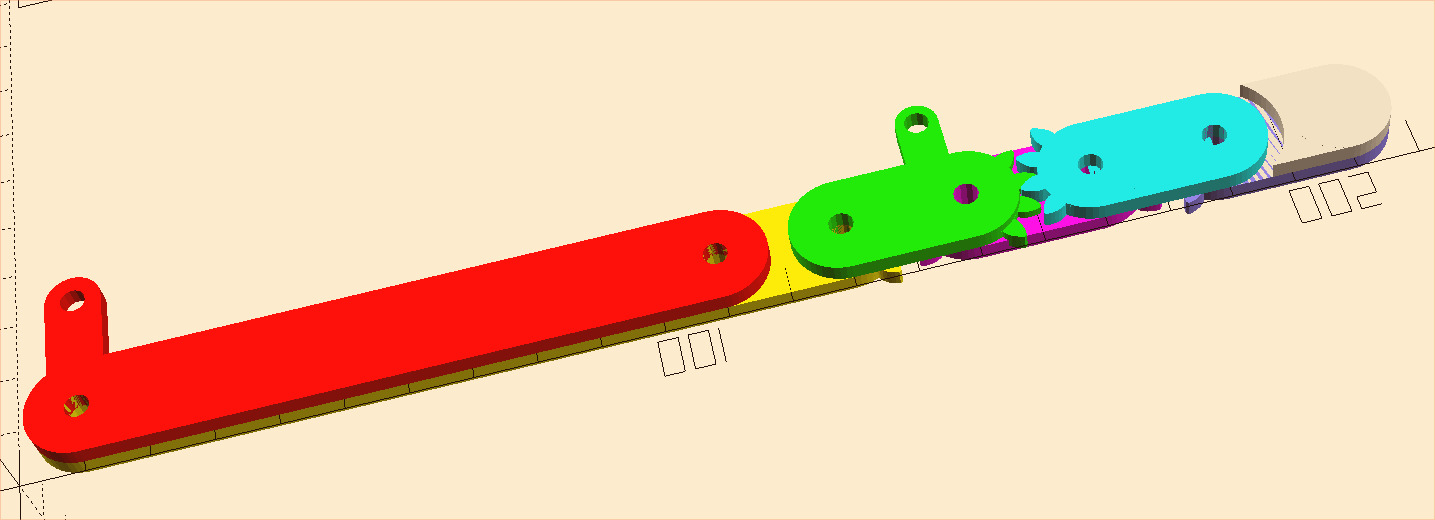
CAD
openscad does everything you need. The .scad file is here, and it needs the gear library.
This CAD file is basically half of a finger (all these parts need to be milled twice to make one finger), making the finger 4mm x 3mm = 12mm thick.
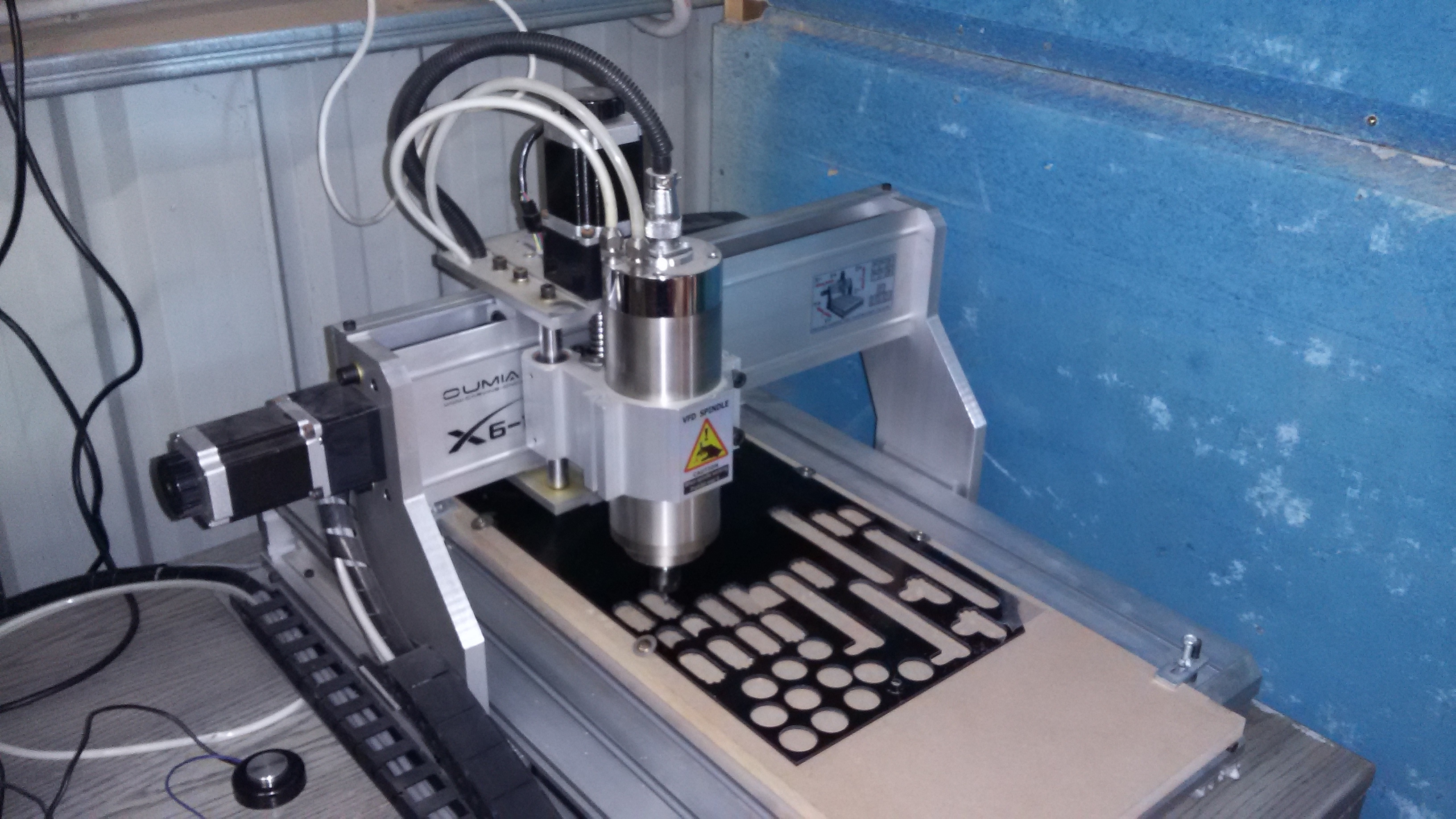
CAM

The .scad was exported (one component at a time) to .dxf files, and then converted (using dxf2gcode) to a number of G-CODE (.ngc) files,
and then milled from 3mm acrylic sheet using a 1.5mm milling bit.
There is no 3-D milling here, just 2-D cut-outs of the sheet. Some parts of the mini actuator were not actually the right dimension, so the plastic sheet splays a bit when it is being constructed.
A more sophisticated version of this would mill out the appropriate bits for a snugger fit.
And yes Dear Reader, sadly the Mach3 software only runs on Windows. It might work on WINE, but I have not tried it.
Circuit diagram
No sophisticated circuits - just an actuator connected to a battery with a reversing switch.
The future

-
Another three fingers.
Maybe an opposing thumb.
Maybe an version with the actuator on the back of the hand instead of taking up space in the palm.
To make this actually do anything useful, the actuator on each finger would have to be controlled separately.
Further, these actuators have limit switches, but don't have position or force sensors, so these would have to be added to the hardware, which is a non-trivial exercise.
And, even with an opposable thumb, this wouldn't have as many degrees of freedom as a human hand. A human finger has three degrees of freedom (if you play a musical instrument, you probably have partially developed a limited fourth, but three is a good approximation). A human hand has 16 degrees of freedom (three per five fingers plus the palm has one more - it can be 'cupped'), and that's before the three at the wrist, one at the elbow and another three at the shoulder. Getting it to make some rude hand signals would be fairly easy, but making a robot hand to do anything requiring the dexterity of a human hand is immensely complicated.
Competing with a billion years of evolution is simply hard to do.
Cool links

Get Allegrobotics updates on twitter
Others have done this better, and with metal instead of plastic.
Google is your friend.
Leave a comment
 Something I'm doing wrong? Solved my problems? Got a better idea? Got a similar problem?
Something I'm doing wrong? Solved my problems? Got a better idea? Got a similar problem?Think I might have solved your problem? Ninety-nine problems, but your robot ain't one? Say so ..